





























Yc yier
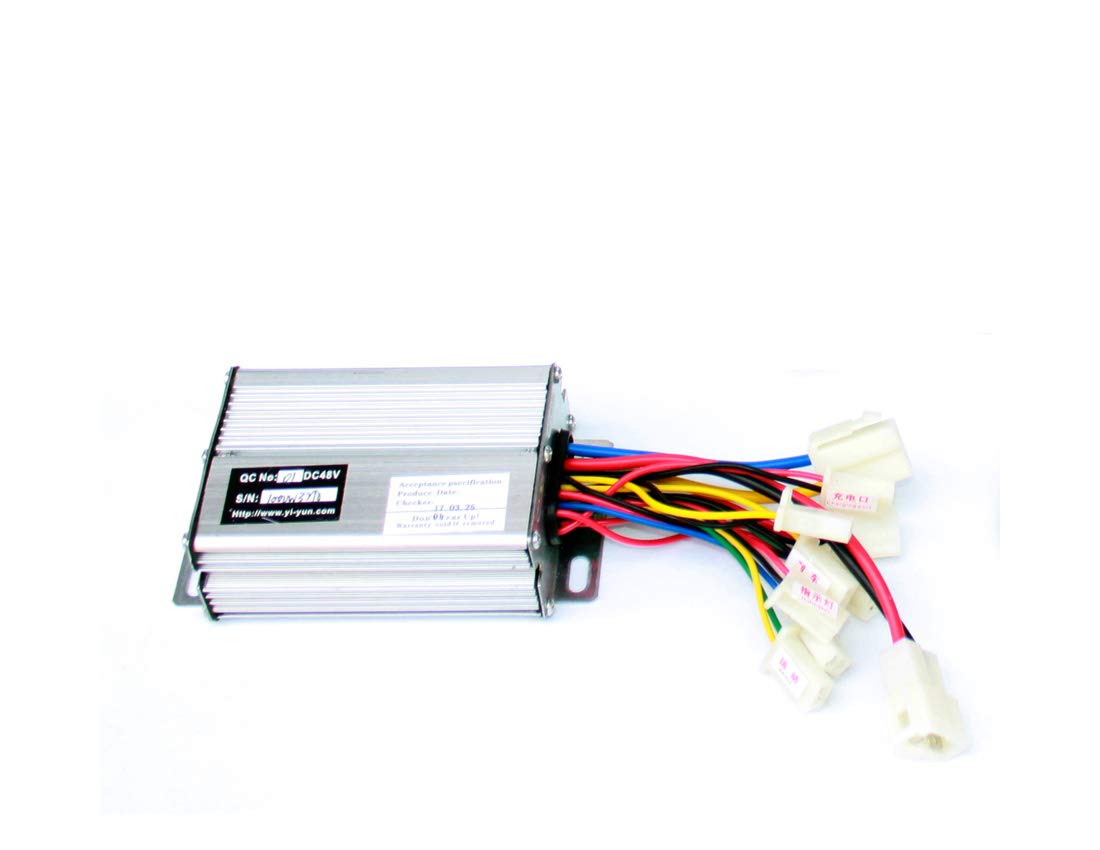
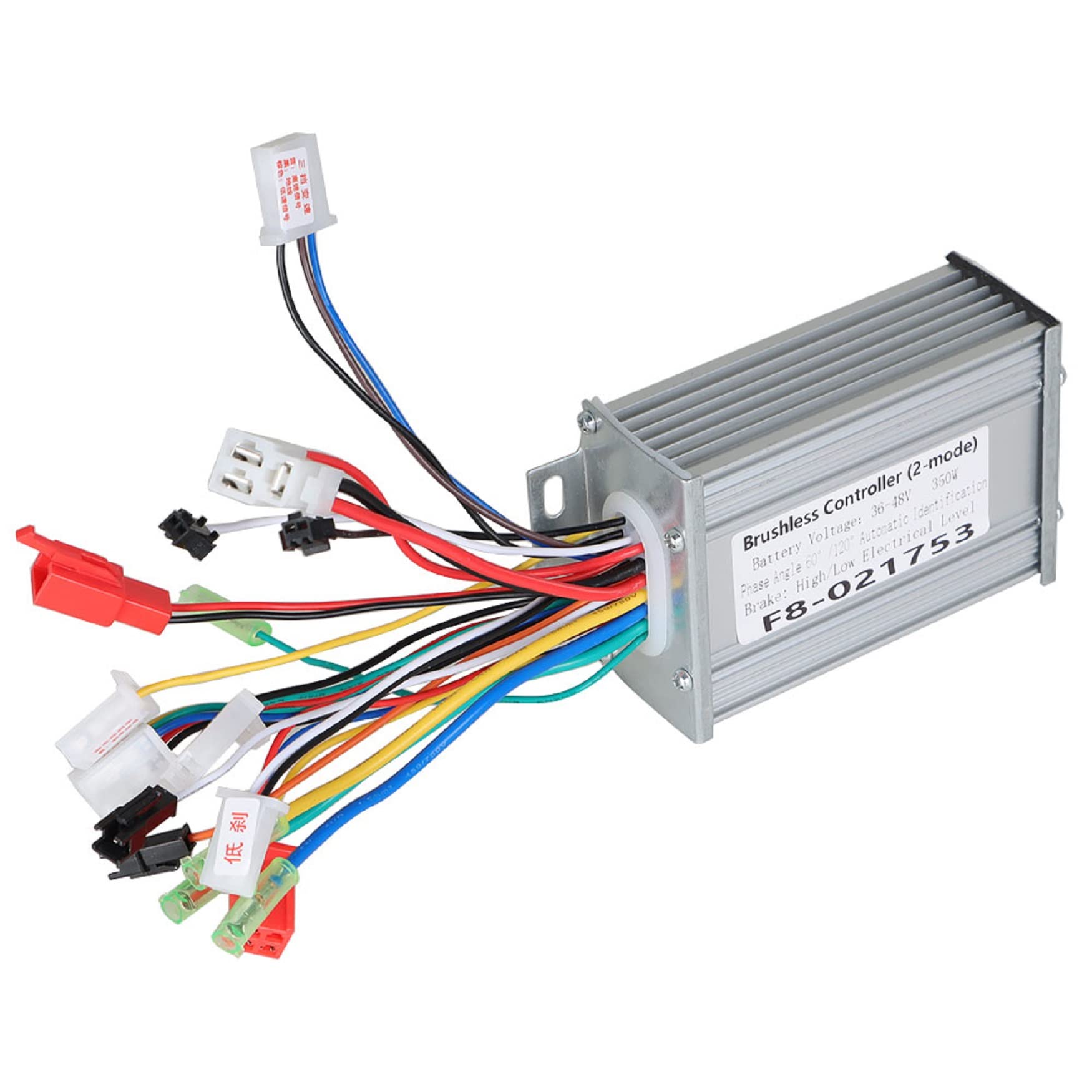
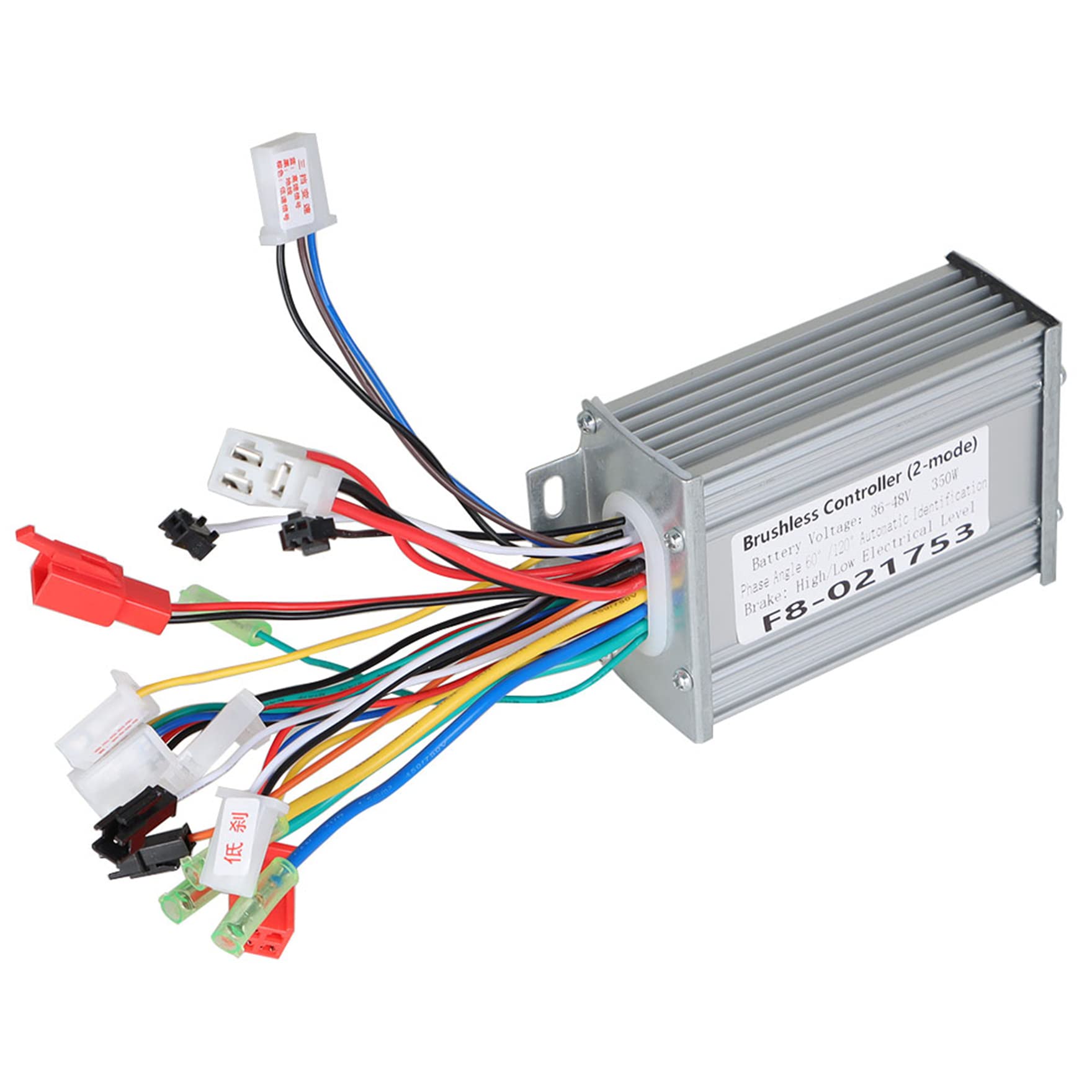
36V-48V 350W -500W Brushless DC Motor Speed Controller & Throttle Grips for Electric Bicycle E-Bike Scooter Go Kart ATV Quad Buggy Tricycle Drift Trike Mini Bike Razor 4 Wheeler
Disponibilidad:
En stock
En stock
Peso con empaque:
1.78 kg
1.78 kg
Devolución:
Sí
Sí
Condición
Nuevo
Nuevo
Producto de:
Amazon
Amazon
Sobre este producto
- Perfect for Go Kart, razor dirt bike, ATV, motorized bicycle, moped, mini bikes, pocket bikes and electric dirt bikes, Electric scooter, E-Bike, electric bicycle, e-Scooter, e-moto, motorcycle, small electric Moto, etc.
- Premium Material--It made of aluminium alloy, this brushless controller is sturdy and durable.
- Sensitive Control--This item is a brushless motor controller, it can provide steady speed and sensitive control of braking and direction changes.
- EASY INSTALLATION: The interfaces have instruction labels on them for your easy installation,very practical and convenient
- LOW MALFUNCTION: The wires and interfaces are durable, and ensure low malfunction of long time use
- Package includes 1x speed controller, 1x throttle grips
AR$94,430
31% OFF
AR$65,123
IMPORT EASILY
By purchasing this product you can deduct VAT with your RUT number
AR$94,430
31% OFF
AR$65,123
Llega en 12 a 18 días hábiles
con envío
Este producto viaja
de USA ![]() a tus manos en
a tus manos en
![]()
Compra protegida
Disfruta de una experiencia de compra segura y confiable
Tarjetas de Crédito y Débito
Visa
Mastercard
American Express
Pagos a través de PayPal
Compra procesada en dólares con dinero en cuenta o tarjetas internacionales.
Paypal
Pagos a través de MODO
Compra procesada en pesos desde la App de tu banco.
PayPal
Conoce más detalles
Brand new 100% Brand New motor brush controller for Electric bicycle & scooter rated voltage: dc 36V/ 48V Current limit : 14A±1A how to connect? 1.connect the motor line (color to color,must connect) 2. connect the battery line(2 red wires is connect to battery + , black connect to battery-,these wires must need connect) 3. connect the controller throttle line(color to color connect) 4. connect the hall line(if motor without hall line, don’t need connect) 5.docking the two self-learning lines, the wheel will forward or reverse. (1.if wheel forward ,Separate the self-learning line. 2.if wheel reverse, Separate the self-learning line. Docking the self-learning line again,if wheel forward ,Separate the self-learning line.) 6.other functions can be connected as needed.

